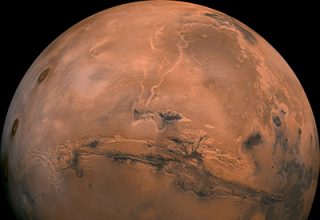
In München fahren Elektrobusse des niederländischen Hersteller Ebusco künftig in Kolonnen. Das erste Fahrzeug ist ganz konventionell mit einem Fahrer besetzt. Dahinter rollen die übrigen Busse in geringem Abstand. Sie machen haargenau das, was der Vordermann vorgibt. Platooning nennt sich das Konzept, das das Karlsruher Institut für Technologie (MIT) gemeinsam mit Ebusco und den Stadtwerken München entwickelt hat.

Testfeld im Norden von München
Das Ziel des Projekts TEMPUS (Testfeld München – Pilotversuch Urbaner automatisierter Straßenverkehr) ist klar definiert. Der Einsatz von Platooning mit elektrischen Stadtbussen soll in der bayerischen Landeshauptstadt realitätsnah erprobt werden. Dafür haben München und der Freistaat Bayern ein urbanes Testfeld für automatisierte und vernetzte Fahrzeuge im Norden der Isar-Metropole ausgewiesen. Gefördert wird TEMPUS vom Bundesministerium für Verkehr und digitale Infrastruktur (BMDV) mit rund zwölf Millionen Euro.
Optimale Anpassung an den Bedarf
„Durch Platooning kann man den Busbetrieb optimal an den Bedarf je nach Tageszeit anpassen“, sagt Nicole Kechler vom Institut für Technik der Informationsverarbeitung (ITIV) am KIT. Werden viele Fahrgäste erwartet hängt man an den Führungsbus einen oder zwei weitere an, was im Normalfall mangels Fahrern nicht machbar ist. Die Busse korrespondieren miteinander. Lässt die Nachfrage nach kann die „elektronische Deichsel“ leicht gekappt werden – die hinteren Fahrzeuge bleiben dann einfach stehen, im Normalfall im Bus-Depot.
Im Windschatten sinkt der Stromverbrauch
Herkömmliche Busse benötigten weit mehr Energie und seien nicht flexibel einsetzbar, wenn es darum gehe, auf stark schwankende Fahrgastzahlen zu reagieren, so Professor Eric Sax, Leiter des ITIV. Da die hinteren Busse im Windschatten fahren verbrauchen sie deutlich weniger Strom als wenn sie allein unterwegs sind.
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Mehr erfahren
Redundanz für mehr Sicherheit
Für die Sicherheit sorgen jede Menge Sensoren an Bord – Lidar-, Radar- und Kamerasysteme überwachen Abstand und Zwischenraum. Fahrzeugdaten wie Position, Lenkwinkel und Geschwindigkeit werden per Funk an den folgenden Bus übertragen. Die Systeme sind zudem redundant ausgelegt. „Ein Bremsmanöver des vorderen Busses erfährt das Folgefahrzeug einmal durch ein durch die Luft übertragenes Signal und zusätzlich durch das Aufleuchten des Bremslichtes“, so Sax.